※内容は2023年6月取材時
[研究テーマ]移動ロボットの機構と制御の研究

子どもの頃の夢は「ロボット研究者」
私が現在の研究に取り組んでいるのは、子どもの頃ロボットアニメに親しんだ影響が大きいと思います。大学では、かつて憧れていたロボット研究者になれるのかも、といった程度の比較的軽い気持ちでロボットを扱う研究室の門を叩いたのがはじまりです。研究室に入り、ともに学ぶ仲間たちから大いに刺激を受け、また恩師からの指導で作ったロボットが国際学会で評価をもらえたことで、大きな達成感を得ることができました。大学時代は、ロボット漬けともいえるほど研究に没頭する日々を過し、設計したロボットが自分の想像通り、さらには期待以上の動きをすると、まるで雷に打たれたような衝撃を感じたものです。
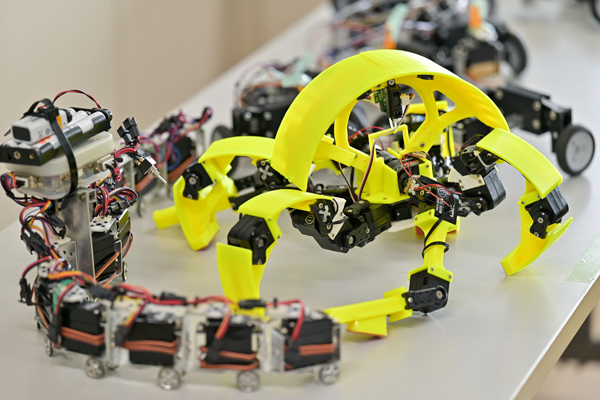
壁面や天井も移動可能なヘビ型ロボット
「移動ロボットの機構設計と運動制御」が研究テーマです。私自身が取り組んでいるのは、学生時代から恩師とともに研究室で取り組んできた「ヘビ型ロボット」。人間に不利な場所や空間、例えば瓦礫の中や宇宙空間、惑星の地表といったところでも移動可能という特長があります。現在挑戦しているのは、「壁面や天井を移動できるヘビ型ロボット」の開発です。胴体部分が空気を吸い込むことで、壁面や天井に接する面が真空状態となり、吸い付く仕組みです。吸い込む力をちょうどよい具合にしないと、ロボットが蛇行せず、うまく動くことができません。その加減が難しいですね。
自分が作りたいロボットを作ろう

大学でロボットについて学ぶ場合、力学の基礎やマイコンの使い方を身につけるのが第一歩。1年次で履修する「メカトロニクス入門」ではマイコンの基礎を、2年次で履修する「共通基盤ワークショップ2A(機械創造設計製作プロジェクト)」では実際にロボットを作り、「ミニロボコン」を開催し、「機械工学プロジェクト基礎A」では課題フィールドをより優れた記録でクリアできる移動マシンを各チームで設計・製作し競い合うなど実践的に学びます。研究室の卒業生の一人は、凹凸のある場所では4足歩行、平坦な場所では自動車のように車輪で移動するロボットを製作しました。彼が研究を始めたきっかけは、映画『スター・ウォーズ』に登場するドロイド「ドロイデカ」を自分の手で作ってみたいと考えたことだそうです。「作りたいロボット」がある方、ぜひ私たちと開発に挑戦しましょう。

