2022年10月12日、工学部 機械工学科 井上文宏教授の共同開発が、第10回ロボット大賞において優秀賞(社会インフラ・災害対応・消防分野)を受賞しました。
「ロボット大賞」は、我が国のロボット技術の発展や社会実装を促進することを目的として、ロボットの先進的な活用や研究開発、人材育成といったさまざまな分野において、優れた取り組みを実施した企業等を表彰する制度です。
第10回ロボット大賞は、経済産業省と一般社団法人日本機械工業連合会を幹事に、総務省、文部科学省、厚生労働省、農林水産省、国土交通省との共催により実施され、10月19日に「Japan Robot Week 2022」(主催:一般社団法人日本ロボット工業会、株式会社日刊工業新聞社)の会場内において、表彰式と受賞ロボット等の展示が行われました。
【受賞題目】
トンネル点検システム「iTOREL(アイトーレル)」
本システムは、東急建設株式会社/東京大学/湘南工科大学/東京理科大学/株式会社小川優機製作所/株式会社菊池製作所により共同開発されたものです。
※「iTOREL\アイ トーレル」は、東急建設株式会社の登録商標です。
【受賞研究開発内容】
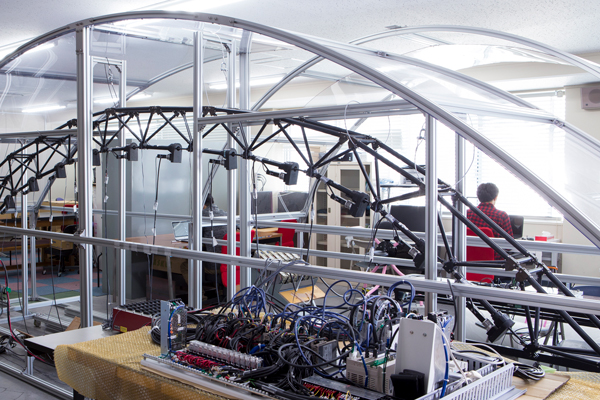
iTORELは、人による近接目視と打音検査の点検業務をロボット技術によって代替することを目指したシステムです。トンネルの覆工コンクリートのひび割れと浮きを自動検出する点検ユニットが搭載されており、作業時間の短縮や省力化を実現できるとともに、メンテナンスサイクルを構築するうえで重要なひび割れ、浮きなどの位置や形状を自動で高精度に検出することができます。また、トンネルの条件によってガントリーフレーム型や高所作業車型を使い分けられる等、実用的なシステムとして評価されました。
井上教授の研究室では、トンネル内部にある、さまざまな障害物を避けるためのトンネル点検システムにおける可変ガイドフレームの自動化・ロボット化について、2016~2022 年度国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の研究補助を得て開発し、その実用化を達成しました。
(審査員の評価)
インフラ作業の自動化は高度成長期に作られた多数のインフラの老朽化に伴う点検作業の増大から急務となっている。打音検査ユニットとラインセンサによる高精度ひび割れ検出システムは、実用的なものが開発されており活用の期待が大きい。また、一般道の検査には従来の検査用車両を改造して取り付けており、実用的なシステムとして期待される。
「ロボット大賞」は、我が国のロボット技術の発展や社会実装を促進することを目的として、ロボットの先進的な活用や研究開発、人材育成といったさまざまな分野において、優れた取り組みを実施した企業等を表彰する制度です。
第10回ロボット大賞は、経済産業省と一般社団法人日本機械工業連合会を幹事に、総務省、文部科学省、厚生労働省、農林水産省、国土交通省との共催により実施され、10月19日に「Japan Robot Week 2022」(主催:一般社団法人日本ロボット工業会、株式会社日刊工業新聞社)の会場内において、表彰式と受賞ロボット等の展示が行われました。
【受賞題目】
トンネル点検システム「iTOREL(アイトーレル)」
本システムは、東急建設株式会社/東京大学/湘南工科大学/東京理科大学/株式会社小川優機製作所/株式会社菊池製作所により共同開発されたものです。
※「iTOREL\アイ トーレル」は、東急建設株式会社の登録商標です。
【受賞研究開発内容】
iTORELは、人による近接目視と打音検査の点検業務をロボット技術によって代替することを目指したシステムです。トンネルの覆工コンクリートのひび割れと浮きを自動検出する点検ユニットが搭載されており、作業時間の短縮や省力化を実現できるとともに、メンテナンスサイクルを構築するうえで重要なひび割れ、浮きなどの位置や形状を自動で高精度に検出することができます。また、トンネルの条件によってガントリーフレーム型や高所作業車型を使い分けられる等、実用的なシステムとして評価されました。
井上教授の研究室では、トンネル内部にある、さまざまな障害物を避けるためのトンネル点検システムにおける可変ガイドフレームの自動化・ロボット化について、2016~2022 年度国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の研究補助を得て開発し、その実用化を達成しました。
(審査員の評価)
インフラ作業の自動化は高度成長期に作られた多数のインフラの老朽化に伴う点検作業の増大から急務となっている。打音検査ユニットとラインセンサによる高精度ひび割れ検出システムは、実用的なものが開発されており活用の期待が大きい。また、一般道の検査には従来の検査用車両を改造して取り付けており、実用的なシステムとして期待される。