柔軟構造物の位置決め制御と遠隔制御
(学術論文18編,解説1編,国際会議9件,国内発表37件,国内発表37件,助成金12件)

振動を有する構造物の位置決め制御や遠隔制御において,センサレス,補償器の低次元化,振動抑制と過渡特性のトレードオフの軽減がこの分野の課題であり,低次元化に起因する振動励起の抑制とセンサレス化を実現する必要がありました.
そこで私は,上記課題の解決を図るため,
1) 閉ループ極を厳密に指定できる前置フィルタを用いた最適サーボ系設計法,
2) 介在インピーダンスを用いたバイラテラル制御則,
3) 修正対称型バイラテラル制御則
を提案しました.
私が提案した設計法を複数の対象に適用し,数値解析と実験を行うことでその有効性を実証してきました.適用した制御問題
1) 柔軟倒立振子の振動制御,2) 柔軟アームの振動制御,3) 柔軟アームの遠隔制御,4) クレーンの揺れ止め制御,5) クレーンの遠隔制御です.
そこで私は,上記課題の解決を図るため,
1) 閉ループ極を厳密に指定できる前置フィルタを用いた最適サーボ系設計法,
2) 介在インピーダンスを用いたバイラテラル制御則,
3) 修正対称型バイラテラル制御則
を提案しました.
私が提案した設計法を複数の対象に適用し,数値解析と実験を行うことでその有効性を実証してきました.適用した制御問題
1) 柔軟倒立振子の振動制御,2) 柔軟アームの振動制御,3) 柔軟アームの遠隔制御,4) クレーンの揺れ止め制御,5) クレーンの遠隔制御です.
高感度皮膚形状変形センシング技術を用いた電動義手の開発
(学術論文1編,解説2編,国際会議4編,国内発表9件)
(国内特許登録3件,外国特許審査中3件,国内特許審査中3件,科研費2件,助成金15件)
(国内特許登録3件,外国特許審査中3件,国内特許審査中3件,科研費2件,助成金15件)

2012年4月に私が筆頭で,筑波大学医学医療系整形外科,茨城県立医療大学付属病院整形外科の2大学病院,航空部品メーカー(株)岩田鉄工所と共に医工・産学連携チームを結成し,共同で新たな電動義手に取り組んでいます。
2013年7月に筑波大学附属病院臨床研究倫理審査の承認,さらに同年10月に茨城県立医療大学付属病院研究倫理審査の承認を得ることができ,正式に5か年計画の臨床研究を開始しました.
これまでの研究活動は,前腕切断患者の残存腕の皮膚形状変形計測技術の確立(約15万倍の信号増幅率を達成),計測制御回路の設計・製作,義手本体の試作,電動ハンドの設計と試作,健常者体験用試作機の開発です。
また,2013年9月採択のA-STEPシーズ顕在化の研究計画に従い,2014年7月と同年8月に欧州4か国の医療機関(大学病院,研究所,メーカー工場)やアメリカ2都市の医療機関(2大学病院,研究所)へリハビリ現場の調査訪問を実施しました.さらに,国内外の特許申請や学会発表,イノベーションジャパンやJSTフェアでのイベント出展,TV出演,新聞発表,外部資金獲得など宣伝活動,運営も並行して実施してきました.
2013年7月に筑波大学附属病院臨床研究倫理審査の承認,さらに同年10月に茨城県立医療大学付属病院研究倫理審査の承認を得ることができ,正式に5か年計画の臨床研究を開始しました.
これまでの研究活動は,前腕切断患者の残存腕の皮膚形状変形計測技術の確立(約15万倍の信号増幅率を達成),計測制御回路の設計・製作,義手本体の試作,電動ハンドの設計と試作,健常者体験用試作機の開発です。
また,2013年9月採択のA-STEPシーズ顕在化の研究計画に従い,2014年7月と同年8月に欧州4か国の医療機関(大学病院,研究所,メーカー工場)やアメリカ2都市の医療機関(2大学病院,研究所)へリハビリ現場の調査訪問を実施しました.さらに,国内外の特許申請や学会発表,イノベーションジャパンやJSTフェアでのイベント出展,TV出演,新聞発表,外部資金獲得など宣伝活動,運営も並行して実施してきました.
実際の動作の様子
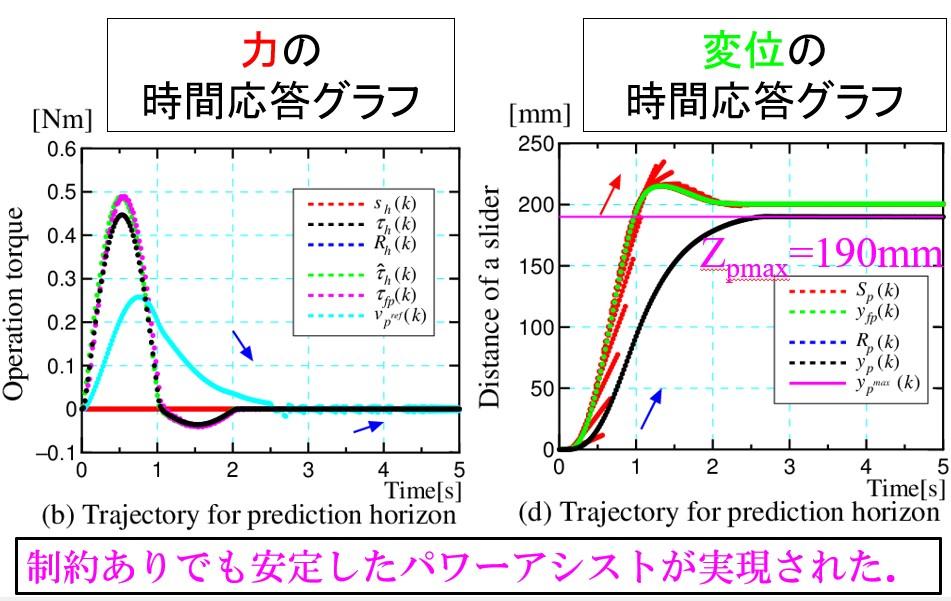
モデル予測制御を用いたパワーアシスト技術の構築
(特許申請予定1件,研究会代表2件,助成金5件)
本研究テーマの目的は,理学療法士や作業療法士が脳卒中片麻痺患者に対して行う運動学習再構築を適切に促すための施術において,患者の皮膚形状変形の定量化です.療法士による施術とそのリハビリ効果の相関関係は,定性的に述べられるのみで,まだ定量的に明らかにされていません.
そこで私は,2013年にぎふ技術革新センター運営協議会ミニWG事業の採択を受けて,社会医療法人八千代病院総合リハビリテーションセンター,航空部品・医療福祉メーカー(株)名南機械製作所,岐阜高専からなる医工・産学官連携チームを立ち上げ,2年間運営しました.その主な活動は,医療現場での実地調査,技術開発と評価,講師を招聘して公開講演会の企画,外部資金獲得でした.WG事業終了後も外部資金を獲得し,現在は,茨城県立医療大学附属病院や昭和大学病院と共に,薄膜ひずみゲージを基にした薄膜皮膚センサの作製と皮膚形状変形計測・評価システムの開発に取り組んでいます.
そこで私は,2013年にぎふ技術革新センター運営協議会ミニWG事業の採択を受けて,社会医療法人八千代病院総合リハビリテーションセンター,航空部品・医療福祉メーカー(株)名南機械製作所,岐阜高専からなる医工・産学官連携チームを立ち上げ,2年間運営しました.その主な活動は,医療現場での実地調査,技術開発と評価,講師を招聘して公開講演会の企画,外部資金獲得でした.WG事業終了後も外部資金を獲得し,現在は,茨城県立医療大学附属病院や昭和大学病院と共に,薄膜ひずみゲージを基にした薄膜皮膚センサの作製と皮膚形状変形計測・評価システムの開発に取り組んでいます.