Yuichi Ikeda, Associate Professor
| Affiliation | Department of Mechanical Engineering, Faculty of Engineering |
| Research Interests | 1. Orbit and attitude control of spacecraft 2. Science education and programming education for elementary and junior high school students |
| SNS | LinkedIn: https://www.linkedin.com/in/%E8%A3%95%E4%B8%80-%E6%B1%A0%E7%94%B0-668803194/ Facebook: https://www.facebook.com/ikeda.yuichi.98/?locale=ja_JP |
| ikeda[at]mech.shonan-it.ac.jp |
Orbit control for ultra-precise formation flight considering thruster on–off characteristics and fuel consumption
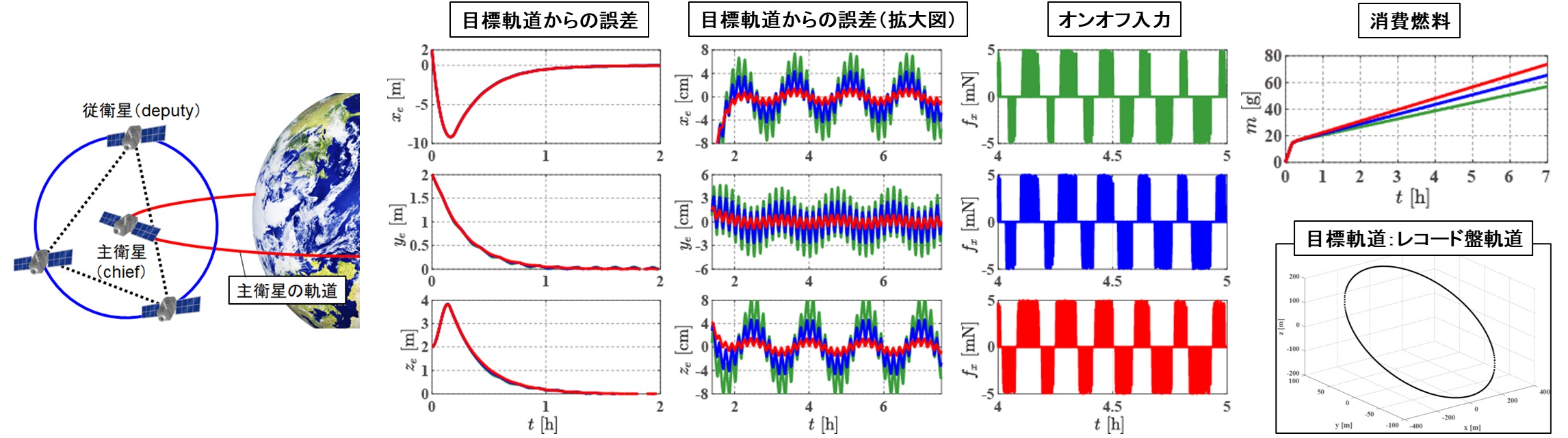
In recent years, formation flight technologies, in which multiple spacecraft control their relative positions and attitudes and cooperatively conduct missions, have been actively studied. Formation flight offers several advantages, including (1) risk dispersion against failures and reduced launch costs, and (2) the ability to realize missions that require long focal lengths or large inter-satellite distances, which are difficult to achieve with a single spacecraft.
The required accuracy of inter-satellite distance is on the order of millimeters to centimeters for occultation observations such as NASA’s Starshade mission, and nanometers to micrometers for interferometric observations such as the LISA mission promoted by ESA and NASA. Spacecraft position (orbit) control is achieved using thrusters; however, thrusters operate in an on?off manner and consume propellant.
This study aims to develop a control methodology that accounts for the on/off characteristics of thrusters and propellant consumption.
[References]
1. Yuichi Ikeda, Yuichi Takaku: Orbit control of spacecraft by on-line optimization of thruster injection timing, 76th International Astronautical Congress, 9 pages, 09/2025.
The required accuracy of inter-satellite distance is on the order of millimeters to centimeters for occultation observations such as NASA’s Starshade mission, and nanometers to micrometers for interferometric observations such as the LISA mission promoted by ESA and NASA. Spacecraft position (orbit) control is achieved using thrusters; however, thrusters operate in an on?off manner and consume propellant.
This study aims to develop a control methodology that accounts for the on/off characteristics of thrusters and propellant consumption.
[References]
1. Yuichi Ikeda, Yuichi Takaku: Orbit control of spacecraft by on-line optimization of thruster injection timing, 76th International Astronautical Congress, 9 pages, 09/2025.
Agile and large-angle attitude control of spacecraft using a combined reaction control system and reaction wheels
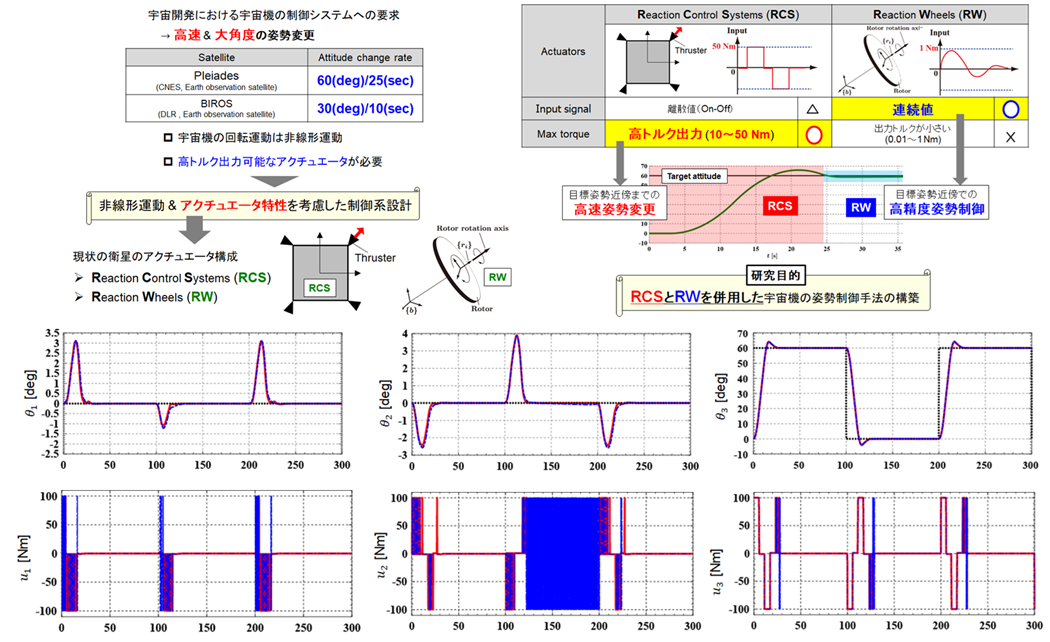
In recent years, astronomical observation and Earth observation satellites have been designed to perform missions that involve rapid and large-angle attitude maneuvers. Such missions require actuators capable of generating high torque, making it necessary to design control systems that explicitly take actuator characteristics into account. One such high-torque actuator is the reaction control system (RCS). Because an RCS utilizes the reaction force of propellant ejected from thrusters, its output is of an on–off nature; however, it can generate high torque and has a simple actuator structure. In practical satellite systems, the control architecture typically employs a combination of an RCS and reaction wheels (RWs).
Accordingly, this study aims to develop a control methodology that combines RCS and RWs, in which (1) the RCS is used to rapidly drive the spacecraft attitude to the vicinity of the target attitude, and (2) the RWs are used to achieve high-precision control (stabilization) near the target.
[References]
1. Yuichi Ikeda, Yuichi Takaku: Predictive Control for Large Angle Attitude Tracking Maneuver of Spacecraft with Reaction Control System and Reaction Wheel, IFAC-PapersOnLine, Vol.56, No.2, 9386-9392, 2023.
2. Yuichi Ikeda, Yuichi Takaku: Large-angle Attitude Maneuver of Spacecraft using Reaction Control System with Consideration of Actuator Dynamics, 2026 AIAA SciTech Forum, 01/2026. (to be presented)
3. Yuichi Ikeda, Yuichi Takaku: Large-angle Attitude Maneuver of Spacecraft by Reaction Control System, 2025 Modeling, Estimation and Control Conference, 269-274, 10/2025.
4. Yuichi Ikeda, Yuichi Takaku: Discrite-time large-angle attitude maneuver of spacecraft by reaction control system, 76th International Astronautical Congress, 13 pages, 10/2025.
5. Yuichi Ikeda, Yuichi Takaku: Large-angle Attitude Maneuver of Spacecraft by using Reaction Control System and Reaction Wheel, 35th International Symposium on Space Technology and Science, Paper No. 2025-d-1-6, 5/2025.
6. Yuichi Ikeda: Predictive Control for Large Angle Attitude Tracking Maneuver of Spacecraft with Reaction Control System and Reaction Wheel, The 22nd IFAC World Congress, pp.10101-10107, 7/2023.
7. Yuichi Ikeda, Yuichi Ikeda: Nonlinear Attitude Tracking Maneuver of Spacecraft with Reaction Control System and Reaction Wheel, SICE Annual Conference 2020, pp.158-161, 9/2020.
8. Yuichi Takaku, Yuichi Ikeda: Nonlinear Attitude Tracking Maneuver of Spacecraft with Reaction Control System and Reaction Wheel, The 21st IFAC World Congress, 6 pages, 7/2020.
9. Atsushi Sakamoto, Yuichi Ikeda, Isao Yamaguchi, Takashi Kida: Nonlinear Model Predictive Control for Large Angle Attitude Maneuver of Spacecraft with RW and RCS, The 55th IEEE Conference on Decision and Control, pp.3202-3209, 12/2016.
Accordingly, this study aims to develop a control methodology that combines RCS and RWs, in which (1) the RCS is used to rapidly drive the spacecraft attitude to the vicinity of the target attitude, and (2) the RWs are used to achieve high-precision control (stabilization) near the target.
[References]
1. Yuichi Ikeda, Yuichi Takaku: Predictive Control for Large Angle Attitude Tracking Maneuver of Spacecraft with Reaction Control System and Reaction Wheel, IFAC-PapersOnLine, Vol.56, No.2, 9386-9392, 2023.
2. Yuichi Ikeda, Yuichi Takaku: Large-angle Attitude Maneuver of Spacecraft using Reaction Control System with Consideration of Actuator Dynamics, 2026 AIAA SciTech Forum, 01/2026. (to be presented)
3. Yuichi Ikeda, Yuichi Takaku: Large-angle Attitude Maneuver of Spacecraft by Reaction Control System, 2025 Modeling, Estimation and Control Conference, 269-274, 10/2025.
4. Yuichi Ikeda, Yuichi Takaku: Discrite-time large-angle attitude maneuver of spacecraft by reaction control system, 76th International Astronautical Congress, 13 pages, 10/2025.
5. Yuichi Ikeda, Yuichi Takaku: Large-angle Attitude Maneuver of Spacecraft by using Reaction Control System and Reaction Wheel, 35th International Symposium on Space Technology and Science, Paper No. 2025-d-1-6, 5/2025.
6. Yuichi Ikeda: Predictive Control for Large Angle Attitude Tracking Maneuver of Spacecraft with Reaction Control System and Reaction Wheel, The 22nd IFAC World Congress, pp.10101-10107, 7/2023.
7. Yuichi Ikeda, Yuichi Ikeda: Nonlinear Attitude Tracking Maneuver of Spacecraft with Reaction Control System and Reaction Wheel, SICE Annual Conference 2020, pp.158-161, 9/2020.
8. Yuichi Takaku, Yuichi Ikeda: Nonlinear Attitude Tracking Maneuver of Spacecraft with Reaction Control System and Reaction Wheel, The 21st IFAC World Congress, 6 pages, 7/2020.
9. Atsushi Sakamoto, Yuichi Ikeda, Isao Yamaguchi, Takashi Kida: Nonlinear Model Predictive Control for Large Angle Attitude Maneuver of Spacecraft with RW and RCS, The 55th IEEE Conference on Decision and Control, pp.3202-3209, 12/2016.
Spacecraft attitude control considering singularity avoidance of control moment gyros
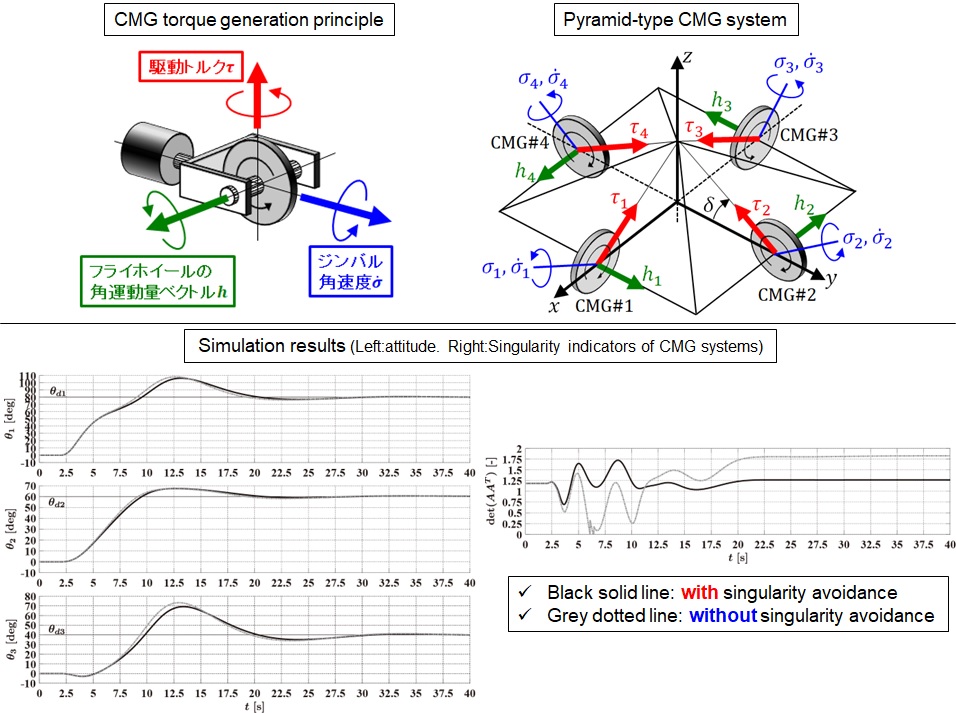
Large satellites that require attitude maintenance and reorientation, as well as small satellites that demand rapid and large-angle attitude maneuvers, require actuators capable of generating high torque. For such applications, control moment gyros (CMGs), which can produce much larger torque than reaction wheels (RWs) and have a high output-torque-to-power-consumption ratio, are well suited.
In general, when three-axis attitude control is performed using CMGs, a CMG system composed of multiple units is employed to generate torque in all three axes and to ensure fault tolerance. However, CMG systems have so-called singularities, which are combinations of gimbal angles at which torque cannot be generated in certain directions. Therefore, the design of attitude control systems for spacecraft equipped with CMGs must explicitly consider singularity avoidance and escape.
This study aims to develop a control methodology that accounts for singularity avoidance of CMGs.
[References]
1. Yuichi Ikeda, Yuichi Takaku, Integral Sliding Mode Attitude Maneuver of Spacecraft with Consideration of Singularity Avoidance of Control Moment Gyros, ASME Letters in Dynamic Systems and Control, Vol.6, No.2, 1-6, 2026. DOI: https://doi.org/10.1115/1.4070119
2. Yuichi Ikeda, Yuichi Takaku, Integral Sliding Mode Attitude Maneuver of Spacecraft with Consideration of Singularity Avoidance of Control Moment Gyros, 2025 Modeling, Estimation and Control Conference, 78-83, 10/2025.
3. Yuichi Ikeda: Large Angle Maneuver of Spacecraft by Nonlinear Model Predictive Control with Consideration of Singularity Avoidance of CMG, SICE Annual Conference 2019, pp.534-537, 9/2019.
In general, when three-axis attitude control is performed using CMGs, a CMG system composed of multiple units is employed to generate torque in all three axes and to ensure fault tolerance. However, CMG systems have so-called singularities, which are combinations of gimbal angles at which torque cannot be generated in certain directions. Therefore, the design of attitude control systems for spacecraft equipped with CMGs must explicitly consider singularity avoidance and escape.
This study aims to develop a control methodology that accounts for singularity avoidance of CMGs.
[References]
1. Yuichi Ikeda, Yuichi Takaku, Integral Sliding Mode Attitude Maneuver of Spacecraft with Consideration of Singularity Avoidance of Control Moment Gyros, ASME Letters in Dynamic Systems and Control, Vol.6, No.2, 1-6, 2026. DOI: https://doi.org/10.1115/1.4070119
2. Yuichi Ikeda, Yuichi Takaku, Integral Sliding Mode Attitude Maneuver of Spacecraft with Consideration of Singularity Avoidance of Control Moment Gyros, 2025 Modeling, Estimation and Control Conference, 78-83, 10/2025.
3. Yuichi Ikeda: Large Angle Maneuver of Spacecraft by Nonlinear Model Predictive Control with Consideration of Singularity Avoidance of CMG, SICE Annual Conference 2019, pp.534-537, 9/2019.
Six-degree-of-freedom nonlinear control of spacecraft with agile and large position/attitude variations
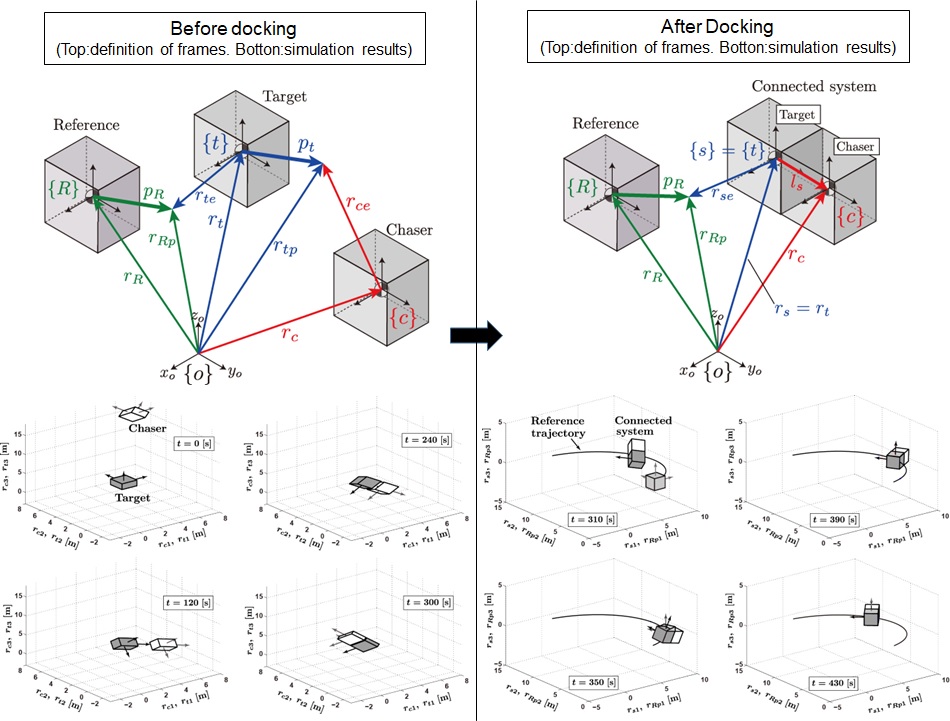
Future spacecraft missions are expected to include operations involving large position and attitude variations, such as space debris removal and rendezvous and docking. These missions can be formulated as tracking control problems with respect to a target spacecraft. Because the motion of such spacecraft constitutes a nonlinear system in which translational and rotational six-degree-of-freedom dynamics are mutually coupled, it is necessary to design control systems that explicitly account for nonlinear motion.
This study aims to develop control methodologies for six-degree-of-freedom nonlinear tracking control problems of spacecraft.
[References]
1. Yuichi Ikeda, Yuichi Takaku: Stabilizing nonlinear robust control of spacecraft before and after docking, the 2025 Australian and New Zealand Control Conference, pp.126-131, 1/2025.
2. Yuichi Ikeda, Takashi Kida and Tomoyuki Nagashio: Stabilizing Nonlinear Adaptive Control of Spacecraft Before and After Capture, Transactions of the Japan Society for Aeronautical and Space Sciences, Vol.59, No.1, pp.1-9, 2016.
3. Yuichi Ikeda, Takashi Kida and Tomoyuki Nagashio: Nonlinear Tracking Control of Rigid Spacecraft under Disturbance using PID Type H∞ Adaptive State Feedback, Transactions of the Japan Society for Aeronautical and Space Sciences, Vol.58, No.5, pp.289-297, 2015.
4. Yuichi Ikeda, Takashi Kida and Tomoyuki Nagashio: Nonlinear Tracking Control of Rigid Spacecraft under Disturbance using PD and PID Type H∞ State Feedback, The 50th IEEE Conference on Decision and Control and European Control Conference, pp.6184-6191, 2011.
This study aims to develop control methodologies for six-degree-of-freedom nonlinear tracking control problems of spacecraft.
[References]
1. Yuichi Ikeda, Yuichi Takaku: Stabilizing nonlinear robust control of spacecraft before and after docking, the 2025 Australian and New Zealand Control Conference, pp.126-131, 1/2025.
2. Yuichi Ikeda, Takashi Kida and Tomoyuki Nagashio: Stabilizing Nonlinear Adaptive Control of Spacecraft Before and After Capture, Transactions of the Japan Society for Aeronautical and Space Sciences, Vol.59, No.1, pp.1-9, 2016.
3. Yuichi Ikeda, Takashi Kida and Tomoyuki Nagashio: Nonlinear Tracking Control of Rigid Spacecraft under Disturbance using PID Type H∞ Adaptive State Feedback, Transactions of the Japan Society for Aeronautical and Space Sciences, Vol.58, No.5, pp.289-297, 2015.
4. Yuichi Ikeda, Takashi Kida and Tomoyuki Nagashio: Nonlinear Tracking Control of Rigid Spacecraft under Disturbance using PD and PID Type H∞ State Feedback, The 50th IEEE Conference on Decision and Control and European Control Conference, pp.6184-6191, 2011.
Development of event content for elementary and junior high school students
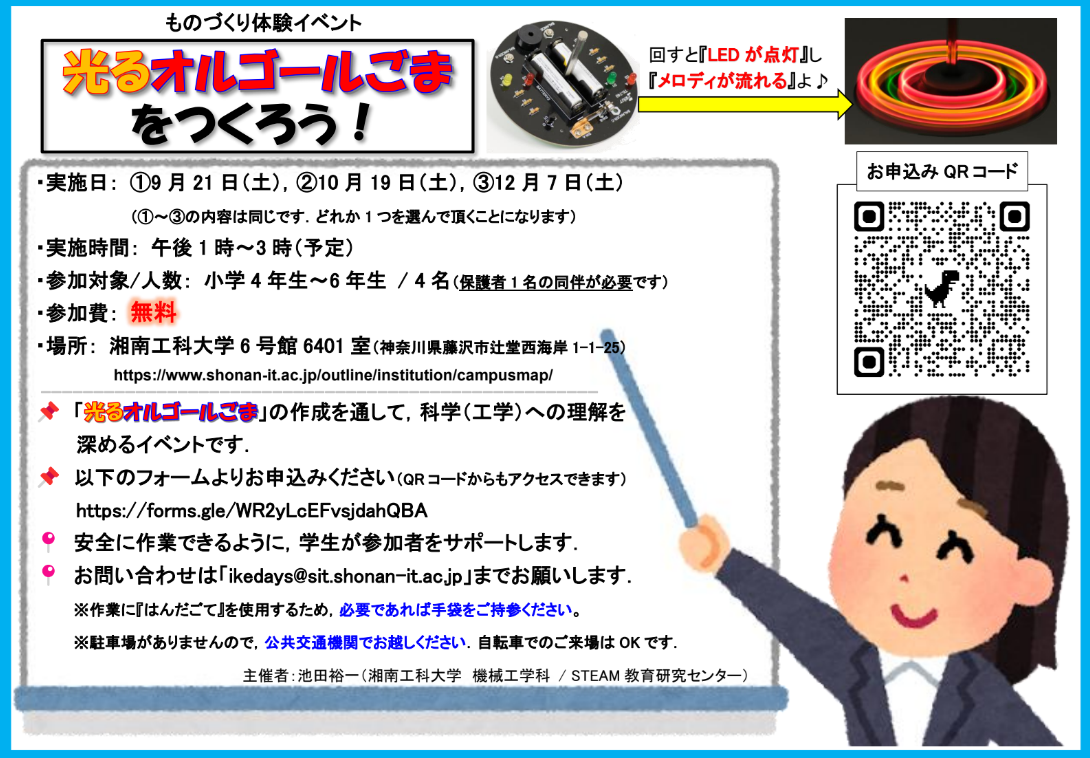
In Japan, a decline in interest in science, often referred to as "the phenomenon of declining interest in science" has been recognized as a social issue since around 1990, raising concerns about future difficulties in securing engineers and researchers. One major factor contributing to this decline is thought to be the decreasing number of opportunities for children to recognize the relevance and necessity of science in everyday life. Although educational institutions, research institutes, and companies currently offer hands-on science workshops, many of these activities are held only on a one-off basis, such as during summer vacations or university open campus events.
The objective of this study is to design and implement event content for elementary and junior high school students that can be held on a regular basis and can be conducted by most university faculty members. At present, we have developed an event using an orgel spinning top and are implementing it on a regular basis.
The objective of this study is to design and implement event content for elementary and junior high school students that can be held on a regular basis and can be conducted by most university faculty members. At present, we have developed an event using an orgel spinning top and are implementing it on a regular basis.
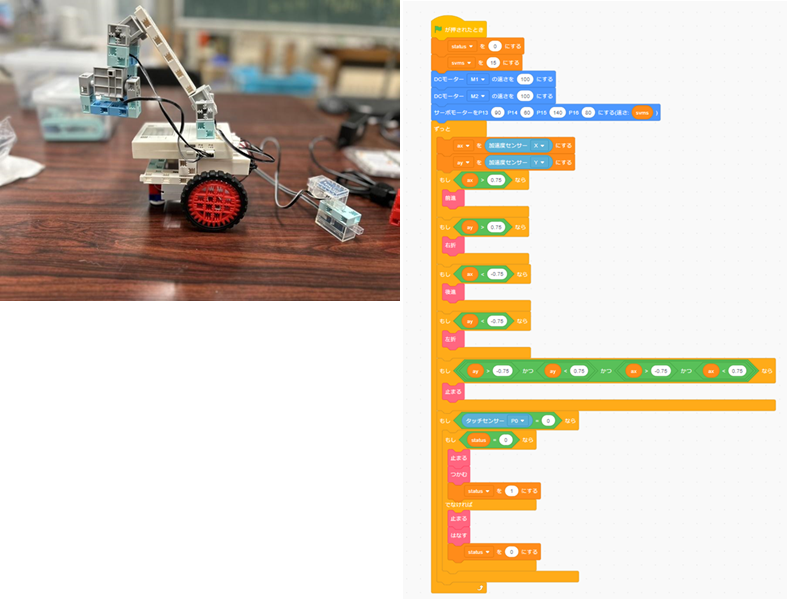
Development of Programming Educational Materials for Elementary and Junior High School Students
Since fiscal year 2020, programming education has been made compulsory in elementary and junior high school classes with the aims of
(1) fostering IT human resources,
(2) developing logical thinking and/or creative abilities, and
(3) acquiring computer skills.
However, the current educational situation faces three major challenges:
(I) insufficient teacher skills,
(II) inadequate learning environments, and
(III) the need for appropriate security measures.
This study focuses on issue (I), namely the lack of teacher skills. Because programming education is a newly introduced subject, there is limited know-how regarding how to structure lessons and how to teach programming effectively. In addition, many teachers do not possess a high level of programming expertise themselves, making it necessary for them to engage in self-learning. However, since programming education must be implemented alongside existing subjects, attending training programs often overlaps with regular duties, placing a significant burden on teachers. As a countermeasure, discussions with our collaborative partner, the Yamato City Board of Education Educational Research Institute, led to the conclusion that the following approaches may be effective.
(i) Teachers who are not well versed in programming are unable to judge the correctness of students’ programs or provide guidance on modifications when solutions other than the pre-prepared answers are presented. As a result, it becomes difficult to conduct effective lessons that leverage students’ ideas. By preparing multiple problems and multiple sample solutions in advance, smooth and effective lesson progression can be achieved.
(ii) Teachers who are not well versed in programming also find it difficult to create classroom assignments, making it challenging to cultivate programming-oriented thinking across diverse problems and the ability to identify commonalities among different tasks. This issue can be addressed by having a variety of assignments prepared by individuals other than the teachers. Moreover, teachers themselves may improve their own programming skills by studying these prepared materials.
Accordingly, this study aims to develop instructional materials that address issue (ii).
(1) fostering IT human resources,
(2) developing logical thinking and/or creative abilities, and
(3) acquiring computer skills.
However, the current educational situation faces three major challenges:
(I) insufficient teacher skills,
(II) inadequate learning environments, and
(III) the need for appropriate security measures.
This study focuses on issue (I), namely the lack of teacher skills. Because programming education is a newly introduced subject, there is limited know-how regarding how to structure lessons and how to teach programming effectively. In addition, many teachers do not possess a high level of programming expertise themselves, making it necessary for them to engage in self-learning. However, since programming education must be implemented alongside existing subjects, attending training programs often overlaps with regular duties, placing a significant burden on teachers. As a countermeasure, discussions with our collaborative partner, the Yamato City Board of Education Educational Research Institute, led to the conclusion that the following approaches may be effective.
(i) Teachers who are not well versed in programming are unable to judge the correctness of students’ programs or provide guidance on modifications when solutions other than the pre-prepared answers are presented. As a result, it becomes difficult to conduct effective lessons that leverage students’ ideas. By preparing multiple problems and multiple sample solutions in advance, smooth and effective lesson progression can be achieved.
(ii) Teachers who are not well versed in programming also find it difficult to create classroom assignments, making it challenging to cultivate programming-oriented thinking across diverse problems and the ability to identify commonalities among different tasks. This issue can be addressed by having a variety of assignments prepared by individuals other than the teachers. Moreover, teachers themselves may improve their own programming skills by studying these prepared materials.
Accordingly, this study aims to develop instructional materials that address issue (ii).