池田 裕一 准教授

| 所属 | 湘南工科大学 工学部 機械工学科 湘南工科大学大学院 工学研究科 機械工学専攻 |
| 学部研究テーマ | 機械システムの制御手法の構築、およびその応用に関する研究 |
| 大学院研究テーマ | (1)スラスタのオンオフ特性と燃料消費を考慮した超精密フォーメーションフライトのための軌道制御 (2)リアクションコントロールシステムとリアクションホイールを併用した宇宙機の高速・大角度姿勢制御 (3)コントロールモーメントジャイロの特異点回避を考慮した宇宙機の姿勢制御 (4)高速かつ大きな位置・姿勢変動を伴う宇宙機の6自由度非線形制御 (5)非線形機械システムの力学的特性に基づいた制御 |
研究キーワード
スラスタのオンオフ特性と燃料消費を考慮した超精密フォーメーションフライトのための軌道制御
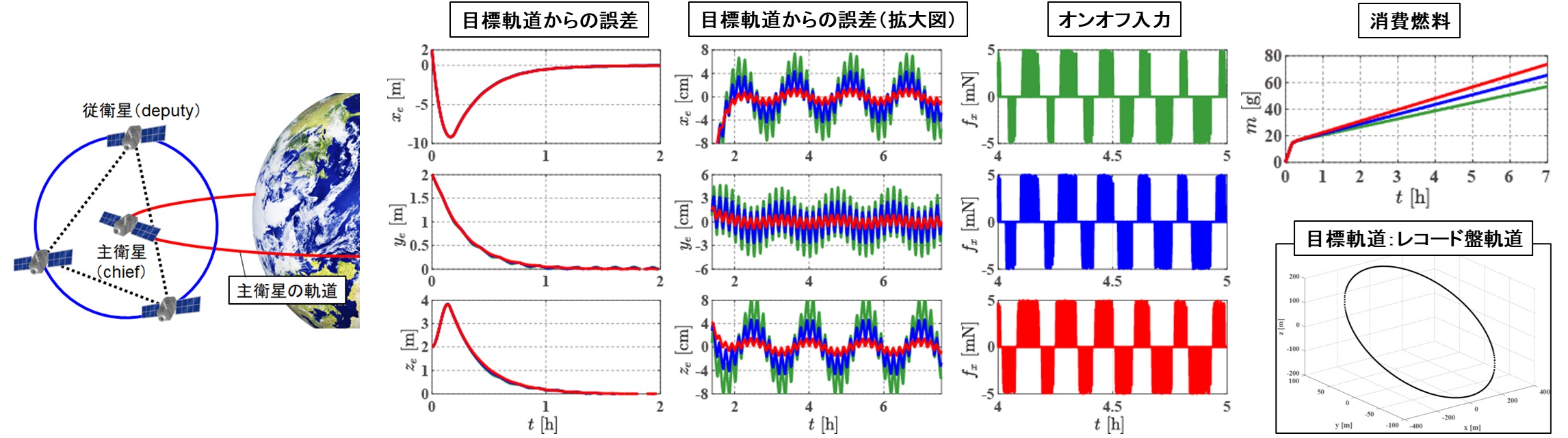
近年,複数の宇宙機が相対位置と姿勢を制御し,協調してミッションを行うフォーメーションフライト技術が盛んに検討されている.フォーメーションフライトには,(1)故障に対するリスク分散や打ち上げコストの削減が可能,(2)単機での実行が困難な長い焦点距離や衛星間距離が必要となるミッションを実現できる,といったメリットがある.衛星間距離の精度は,NASA のStarshade計画のようなオカルタ観測ではmm~cm,ESAとNASAが進めるLISAミッションのような干渉観測ではnm~μmの精度が要求される.宇宙機の位置(軌道)制御にはスラスタを使用するが,スラスタの出力はオンオフであり燃料を消費する.
本研究では,スラスタのオンオフ特性と燃料消費を考慮した制御手法の構築を目的としている.
<関連文献>
1.高久雄一,池田裕一,スラスタ噴射閾値のオンライン最適化による宇宙機の離散時間軌道制御,第69 回宇宙科学技術連合講演会,Paper No. 3L18(6 ページ),2025 年11 月
2.Yuichi Ikeda, Yuichi Takaku, Orbit control of spacecraft by on-line optimization of thruster injection timing, 76th International Astronautical Congress, 9 pages, 2025 年9 月
3.池田裕一,高久雄一,スラスタ配置の冗長性を考慮した宇宙機の軌道制御,第12 回制御部門マルチシンポジウム,Paper No. 1A6-1(5 ページ),2025 年3 月
4.池田裕一,スラスタ不感帯のオンライン最適化による宇宙機の軌道制御,2024 年度 計測自動制御学会関西支部・システム制御情報学会シンポジウム,84-85,2025 年1 月
5.池田裕一:入力飽和を考慮した宇宙機の軌道制御,第67回自動制御連合講演会,pp.8-12,2024年11月
6.池田裕一,高久雄一:スラスタの動特性を考慮した宇宙機の軌道制御,第68回宇宙科学技術連合講演会,Paper No. 2F06(4 ページ),2024年11月
7.池田裕一,高久雄一:スラスタによる宇宙機の離散時間軌道制御,第11回制御部門マルチシンポジウム,Paper No. 2M5-3(5 ページ),2024年3月
8.池田裕一,鄧暉:通信遅延を考慮した宇宙機の軌道制御,2023年度計測自動制御学会関西支部・システム制御情報学会シンポジウム,pp.15-16,2024年1月
9.池田裕一,鄧暉:外乱抑制を考慮したオンオフ入力による宇宙機の軌道制御,日本航空宇宙学会 第60回関西・中部支部合同秋季大会,4ページ,2023年11月
10.池田裕一,高久雄一:スラスタのオンオフ特性と燃料消費を考慮した宇宙機の軌道制御,第67回宇宙科学技術連合講演会,Paper No. 3F13(3 ページ),2023年10月
11.池田裕一,鄧暉:オンオフ入力による宇宙機の離散時間軌道制御,計測自動制御学会 中部支部シンポジウム2023,ポスター発表,2023年9月
12.池田裕一,鄧暉:オンオフ入力による宇宙機の軌道制御,計測自動制御学会 中部支部シンポジウム2023,ポスター発表,2023年9月
本研究では,スラスタのオンオフ特性と燃料消費を考慮した制御手法の構築を目的としている.
<関連文献>
1.高久雄一,池田裕一,スラスタ噴射閾値のオンライン最適化による宇宙機の離散時間軌道制御,第69 回宇宙科学技術連合講演会,Paper No. 3L18(6 ページ),2025 年11 月
2.Yuichi Ikeda, Yuichi Takaku, Orbit control of spacecraft by on-line optimization of thruster injection timing, 76th International Astronautical Congress, 9 pages, 2025 年9 月
3.池田裕一,高久雄一,スラスタ配置の冗長性を考慮した宇宙機の軌道制御,第12 回制御部門マルチシンポジウム,Paper No. 1A6-1(5 ページ),2025 年3 月
4.池田裕一,スラスタ不感帯のオンライン最適化による宇宙機の軌道制御,2024 年度 計測自動制御学会関西支部・システム制御情報学会シンポジウム,84-85,2025 年1 月
5.池田裕一:入力飽和を考慮した宇宙機の軌道制御,第67回自動制御連合講演会,pp.8-12,2024年11月
6.池田裕一,高久雄一:スラスタの動特性を考慮した宇宙機の軌道制御,第68回宇宙科学技術連合講演会,Paper No. 2F06(4 ページ),2024年11月
7.池田裕一,高久雄一:スラスタによる宇宙機の離散時間軌道制御,第11回制御部門マルチシンポジウム,Paper No. 2M5-3(5 ページ),2024年3月
8.池田裕一,鄧暉:通信遅延を考慮した宇宙機の軌道制御,2023年度計測自動制御学会関西支部・システム制御情報学会シンポジウム,pp.15-16,2024年1月
9.池田裕一,鄧暉:外乱抑制を考慮したオンオフ入力による宇宙機の軌道制御,日本航空宇宙学会 第60回関西・中部支部合同秋季大会,4ページ,2023年11月
10.池田裕一,高久雄一:スラスタのオンオフ特性と燃料消費を考慮した宇宙機の軌道制御,第67回宇宙科学技術連合講演会,Paper No. 3F13(3 ページ),2023年10月
11.池田裕一,鄧暉:オンオフ入力による宇宙機の離散時間軌道制御,計測自動制御学会 中部支部シンポジウム2023,ポスター発表,2023年9月
12.池田裕一,鄧暉:オンオフ入力による宇宙機の軌道制御,計測自動制御学会 中部支部シンポジウム2023,ポスター発表,2023年9月
リアクションコントロールシステムとリアクションホイールを併用した宇宙機の高速・大角度姿勢制御
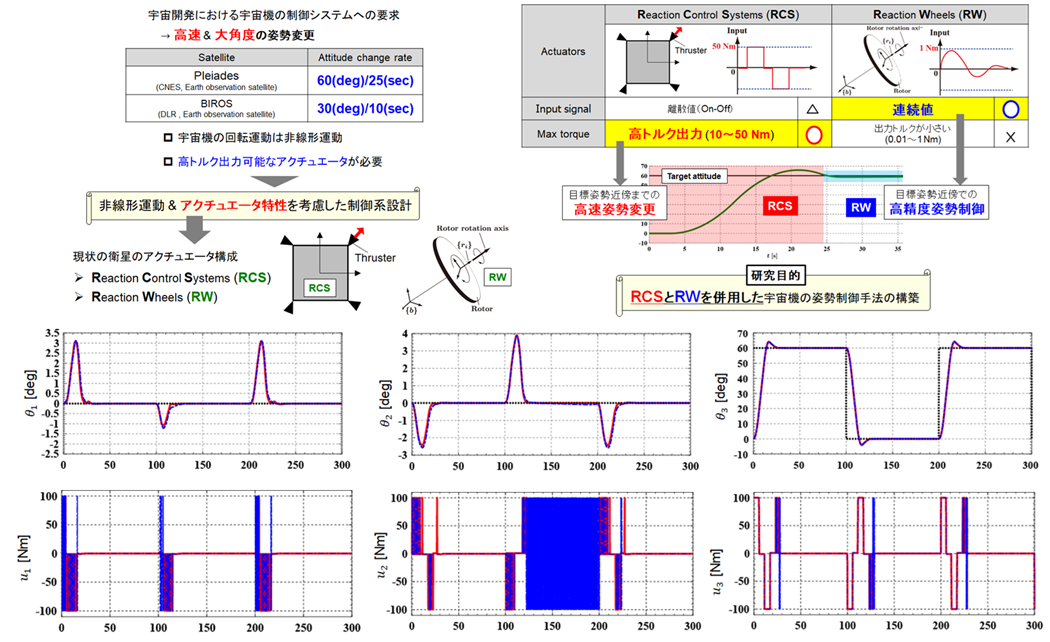
近年の天文観測・地球観測衛星においては,高速かつ大角度姿勢変更を伴うミッションが考えられている.このようなミッションでは高トルクが出力可能なアクチュエータが必須となるため,アクチュエータ特性を考慮した制御系設計が必要である.高トルクが出力可能なアクチュエータとして,リアクションコントロールシステム(reaction control system : RCS)がある.RCS はスラスタの燃料噴射の反作用力を用いているためオンオフ出力となるが,高トルクが生成できアクチュエータの構造が単純である.また,現状の実用衛星の制御系は,通常,RCSとリアクションホイール ( Reaction Wheel : RW) を併用する構成となっている.
このことから,(1) RCS により目標姿勢近傍まで素早く姿勢を到達させ,(2) RW により目標値近傍での高精度制御(安定化制御)を行う,というようなRCS とRW を併用した制御手法の構築を目的としている.
<関連文献>
1.池田裕一,宇宙機の軌道・姿勢制御技術,電子情報通信学会誌,第108 号,第10 号,978-983,2025 年10 月
2.池田裕一,木田隆:アクチュエータの特性を考慮した姿勢制御:敏捷な宇宙機の実現を目指して,計測と制御,第57号,第4号,pp.253-259, 2018年4月.
3.Yuichi Ikeda, Yuichi Takaku, Predictive Control for Large Angle Attitude Tracking Maneuver of Spacecraft with Reaction Control System and Reaction Wheel, IFAC-PapersOnLine, Vol.56, No.2, 9386-9392, 2023 年
4.阪本篤志,池田裕一,山口功,木田隆:モデル予測制御による宇宙機の非線形トラッキング制御:線形パラメータ変動システムを用いた設計,航空宇宙技術,第15巻,pp.133-140, 2016年11月.
5.阪本篤志,池田裕一,山口功,木田隆:非線形モデル予測制御を用いた宇宙機の姿勢制御(スラスタとホイールによる閉ループ系の安定性と最適性),日本機械学会論文集,第82巻,第842号,Paper No.16-00198 (13 ページ), 2016年10月.
6.Yuichi Ikeda, Yuichi Takaku, Large-angle Attitude Maneuver of Spacecraft using Reaction Control System with Consideration of
Actuator Dynamics, 2026 AIAA SciTech Forum, 2026年1月(発表予定)
7.Yuichi Ikeda, Yuichi Takaku, Large-angle Attitude Maneuver of Spacecraft by Reaction Control System, 2025 Modeling, Estimation and Control Conference, 269-274, 2025年10月
8.Yuichi Ikeda, Yuichi Takaku, Discrite-time large-angle attitude maneuver of spacecraft by reaction control system, 76th International Astronautical Congress, 13 pages, 2025年10月
9.Yuichi Ikeda, Yuichi Takaku: Large-angle Attitude Maneuver of Spacecraft by using Reaction Control System and Reaction Wheel, 35th International Symposium on Space Technology and Science, Paper No. 2025-d-1-6, 2025年5月.
10.Yuichi Ikeda: Predictive Control for Large Angle Attitude Tracking Maneuver of Spacecraft with Reaction Control System and Reaction Wheel, The 22nd IFAC World Congress, pp.10101-10107, 2023年7月.
11.池田裕一:スラスタ特性の近似関数を用いた宇宙機の姿勢制御,第9回制御部門マルチシンポジウム,Paper No.3B1-6(3ページ), 2022年3月.
12.池田裕一,高久雄一:Reaction control system のスラスタ出力配分を考慮した宇宙機の姿勢制御,第64回自動制御連合講演会,pp.94-99, 2021 年11 月.
13.池田裕一:スラスタの出力不確かさを考慮した宇宙機の姿勢制御,第65回宇宙科学技術連合講演会,Paper No.4G02(6ページ), 2021年11月.
14.池田裕一,高久雄一:Reaction control system の燃料消費を考慮した宇宙機の姿勢制御,第8回制御部門マルチシンポジウム,Paper No.1B2-3(4ページ), 2021年3月.
15.高久雄一,池田裕一:燃料消費を考慮したRCS・RW併用宇宙機の大角度姿勢制御,第64回宇宙科学技術連合講演会,Paper No.1F05(5ページ),
2020 年10 月.
16.Yuichi Takaku, Yuichi Ikeda: Nonlinear Attitude Tracking Maneuver of Spacecraft with Reaction Control System and Reaction Wheel, SICE Annual Conference 2020, pp.158-161, 2020 年9 月.
17.Yuichi Takaku, Yuichi Ikeda: Nonlinear Attitude Tracking Maneuver of Spacecraft with Reaction Control System and Reaction Wheel, The 21st IFAC World Congress, 6 pages, 2020 年7月.
18.池田裕一:モデル予測制御によるRCS・RW併用宇宙機の大角度姿勢制御,第7回制御部門マルチシンポジウム,Paper No.2D2-2(7ページ), 2020 年3 月.
19.池田裕一:RCSとRWを併用した宇宙機の大角度姿勢制御,第63回宇宙科学技術連合講演会,Paper No.1B11(6ページ), 2019年11月.
20.池田裕一:RWとRCSを併用した宇宙機の離散時間非線形姿勢制御,第6回制御部門マルチシンポジウム,Paper No.1H2-2(5ページ), 2019年3月
21.池田裕一,木田隆:アクチュエータの特性を考慮した宇宙機のモデル予測制御,第61回自動制御連合講演会,pp.1488-1494, 2018年11月.
22. 池田裕一:スラスタとリアクションホイールを併用した宇宙機の大角度姿勢制御,第5回制御部門マルチシンポジウム,Paper No.Fr93-2(3ページ), 2018 年3 月.
23.Atsushi Sakamoto, Yuichi Ikeda, Isao Yamaguchi, Takashi Kida: Nonlinear Model Predictive Control for Large Angle Attitude Maneuver of Spacecraft with RW and RCS, The 55th IEEE Conference on Decision and Control, pp.3202-3209, 2016 年12 月.
このことから,(1) RCS により目標姿勢近傍まで素早く姿勢を到達させ,(2) RW により目標値近傍での高精度制御(安定化制御)を行う,というようなRCS とRW を併用した制御手法の構築を目的としている.
<関連文献>
1.池田裕一,宇宙機の軌道・姿勢制御技術,電子情報通信学会誌,第108 号,第10 号,978-983,2025 年10 月
2.池田裕一,木田隆:アクチュエータの特性を考慮した姿勢制御:敏捷な宇宙機の実現を目指して,計測と制御,第57号,第4号,pp.253-259, 2018年4月.
3.Yuichi Ikeda, Yuichi Takaku, Predictive Control for Large Angle Attitude Tracking Maneuver of Spacecraft with Reaction Control System and Reaction Wheel, IFAC-PapersOnLine, Vol.56, No.2, 9386-9392, 2023 年
4.阪本篤志,池田裕一,山口功,木田隆:モデル予測制御による宇宙機の非線形トラッキング制御:線形パラメータ変動システムを用いた設計,航空宇宙技術,第15巻,pp.133-140, 2016年11月.
5.阪本篤志,池田裕一,山口功,木田隆:非線形モデル予測制御を用いた宇宙機の姿勢制御(スラスタとホイールによる閉ループ系の安定性と最適性),日本機械学会論文集,第82巻,第842号,Paper No.16-00198 (13 ページ), 2016年10月.
6.Yuichi Ikeda, Yuichi Takaku, Large-angle Attitude Maneuver of Spacecraft using Reaction Control System with Consideration of
Actuator Dynamics, 2026 AIAA SciTech Forum, 2026年1月(発表予定)
7.Yuichi Ikeda, Yuichi Takaku, Large-angle Attitude Maneuver of Spacecraft by Reaction Control System, 2025 Modeling, Estimation and Control Conference, 269-274, 2025年10月
8.Yuichi Ikeda, Yuichi Takaku, Discrite-time large-angle attitude maneuver of spacecraft by reaction control system, 76th International Astronautical Congress, 13 pages, 2025年10月
9.Yuichi Ikeda, Yuichi Takaku: Large-angle Attitude Maneuver of Spacecraft by using Reaction Control System and Reaction Wheel, 35th International Symposium on Space Technology and Science, Paper No. 2025-d-1-6, 2025年5月.
10.Yuichi Ikeda: Predictive Control for Large Angle Attitude Tracking Maneuver of Spacecraft with Reaction Control System and Reaction Wheel, The 22nd IFAC World Congress, pp.10101-10107, 2023年7月.
11.池田裕一:スラスタ特性の近似関数を用いた宇宙機の姿勢制御,第9回制御部門マルチシンポジウム,Paper No.3B1-6(3ページ), 2022年3月.
12.池田裕一,高久雄一:Reaction control system のスラスタ出力配分を考慮した宇宙機の姿勢制御,第64回自動制御連合講演会,pp.94-99, 2021 年11 月.
13.池田裕一:スラスタの出力不確かさを考慮した宇宙機の姿勢制御,第65回宇宙科学技術連合講演会,Paper No.4G02(6ページ), 2021年11月.
14.池田裕一,高久雄一:Reaction control system の燃料消費を考慮した宇宙機の姿勢制御,第8回制御部門マルチシンポジウム,Paper No.1B2-3(4ページ), 2021年3月.
15.高久雄一,池田裕一:燃料消費を考慮したRCS・RW併用宇宙機の大角度姿勢制御,第64回宇宙科学技術連合講演会,Paper No.1F05(5ページ),
2020 年10 月.
16.Yuichi Takaku, Yuichi Ikeda: Nonlinear Attitude Tracking Maneuver of Spacecraft with Reaction Control System and Reaction Wheel, SICE Annual Conference 2020, pp.158-161, 2020 年9 月.
17.Yuichi Takaku, Yuichi Ikeda: Nonlinear Attitude Tracking Maneuver of Spacecraft with Reaction Control System and Reaction Wheel, The 21st IFAC World Congress, 6 pages, 2020 年7月.
18.池田裕一:モデル予測制御によるRCS・RW併用宇宙機の大角度姿勢制御,第7回制御部門マルチシンポジウム,Paper No.2D2-2(7ページ), 2020 年3 月.
19.池田裕一:RCSとRWを併用した宇宙機の大角度姿勢制御,第63回宇宙科学技術連合講演会,Paper No.1B11(6ページ), 2019年11月.
20.池田裕一:RWとRCSを併用した宇宙機の離散時間非線形姿勢制御,第6回制御部門マルチシンポジウム,Paper No.1H2-2(5ページ), 2019年3月
21.池田裕一,木田隆:アクチュエータの特性を考慮した宇宙機のモデル予測制御,第61回自動制御連合講演会,pp.1488-1494, 2018年11月.
22. 池田裕一:スラスタとリアクションホイールを併用した宇宙機の大角度姿勢制御,第5回制御部門マルチシンポジウム,Paper No.Fr93-2(3ページ), 2018 年3 月.
23.Atsushi Sakamoto, Yuichi Ikeda, Isao Yamaguchi, Takashi Kida: Nonlinear Model Predictive Control for Large Angle Attitude Maneuver of Spacecraft with RW and RCS, The 55th IEEE Conference on Decision and Control, pp.3202-3209, 2016 年12 月.
コントロールモーメントジャイロの特異点回避を考慮した姿勢制御
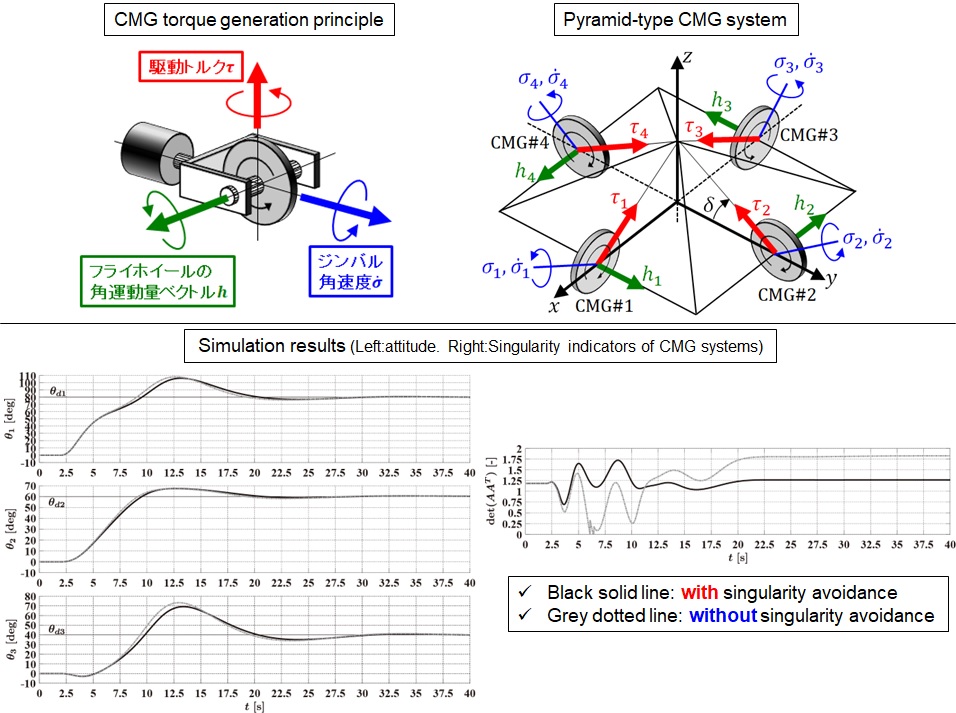
大型衛星の姿勢保持・変更や,高速かつ大角度姿勢変更を要する小型衛星には大きなトルクを出力することができるアクチュエータが必要となる.これらに対しては,リアクションホイール(RW)と比べて大きなトルクを出力することが可能であり,かつ消費電力に対する出力トルク比が高いコントロールモーメントジャイロ(CMG)の使用が適している.通常,CMG により3 軸姿勢制御を行う場合,3 軸方向にトルクを出力させることや耐故障性の観点から複数個のCMG を組合わせたCMG システムを用いるが,CMG システムには特異点と呼ばれるある軸方向へのトルクが出力できないジンバル角の組合わせが存在する.そのため,CMG搭載宇宙機の姿勢制御には特異点回避・脱出を考慮した制御系設計が必須である.
本研究では,CMGの特異点回避を考慮した制御手法の構築を目的としている.
<関連文献>
1.Yuichi Ikeda, Yuichi Takaku, Integral Sliding Mode Attitude Maneuver of Spacecraft with Consideration of Singularity Avoidance
of Control Moment Gyros, ASME Letters in Dynamic Systems and Control, Vol.6, No.2, 1-6, 2026年. DOI: https://doi.org/10.1115/1.4070119
2.Yuichi Ikeda, Yuichi Takaku, Integral Sliding Mode Attitude Maneuver of Spacecraft with Consideration of Singularity Avoidance
of Control Moment Gyros, 2025 Modeling, Estimation and Control Conference, 78-83, 2025 年10 月
3.池田裕一,高久雄一:コントロール・モーメント・ジャイロの特異点回避を考慮した宇宙機の姿勢マニューバ,第66回自動制御連合講演会,pp.314-318,2023
4.池田裕一:CMG 搭載宇宙機の非線形離散時間姿勢制御,第10 回制御部門マルチシンポジウム,Paper No. 1M4-1(3 ページ),2023
5.池田裕一:CMG 搭載宇宙機の離散時間姿勢制御,第66 回宇宙科学技術連合講演会,Paper No. 1L11(5 ページ),2022
6.Yuichi Ikeda: Large Angle Maneuver of Spacecraft by Nonlinear Model Predictive Control with Consideration of Singularity Avoidance of CMG, SICE Annual Conference 2019, pp.534-537, 2019
7.池田裕一,木田隆:アクチュエータの特性を考慮した宇宙機のモデル予測制御,第61 回自動制御連合講演会,pp.1488-1494,2018
8.池田裕一,木田隆:アクチュエータの特性を考慮した姿勢制御:敏捷な宇宙機の実現を目指して,計測と制御,第57号,第4号,pp.253-259,2018
本研究では,CMGの特異点回避を考慮した制御手法の構築を目的としている.
<関連文献>
1.Yuichi Ikeda, Yuichi Takaku, Integral Sliding Mode Attitude Maneuver of Spacecraft with Consideration of Singularity Avoidance
of Control Moment Gyros, ASME Letters in Dynamic Systems and Control, Vol.6, No.2, 1-6, 2026年. DOI: https://doi.org/10.1115/1.4070119
2.Yuichi Ikeda, Yuichi Takaku, Integral Sliding Mode Attitude Maneuver of Spacecraft with Consideration of Singularity Avoidance
of Control Moment Gyros, 2025 Modeling, Estimation and Control Conference, 78-83, 2025 年10 月
3.池田裕一,高久雄一:コントロール・モーメント・ジャイロの特異点回避を考慮した宇宙機の姿勢マニューバ,第66回自動制御連合講演会,pp.314-318,2023
4.池田裕一:CMG 搭載宇宙機の非線形離散時間姿勢制御,第10 回制御部門マルチシンポジウム,Paper No. 1M4-1(3 ページ),2023
5.池田裕一:CMG 搭載宇宙機の離散時間姿勢制御,第66 回宇宙科学技術連合講演会,Paper No. 1L11(5 ページ),2022
6.Yuichi Ikeda: Large Angle Maneuver of Spacecraft by Nonlinear Model Predictive Control with Consideration of Singularity Avoidance of CMG, SICE Annual Conference 2019, pp.534-537, 2019
7.池田裕一,木田隆:アクチュエータの特性を考慮した宇宙機のモデル予測制御,第61 回自動制御連合講演会,pp.1488-1494,2018
8.池田裕一,木田隆:アクチュエータの特性を考慮した姿勢制御:敏捷な宇宙機の実現を目指して,計測と制御,第57号,第4号,pp.253-259,2018
高速かつ大きな位置・姿勢変動を伴う宇宙機の6自由度非線形制御
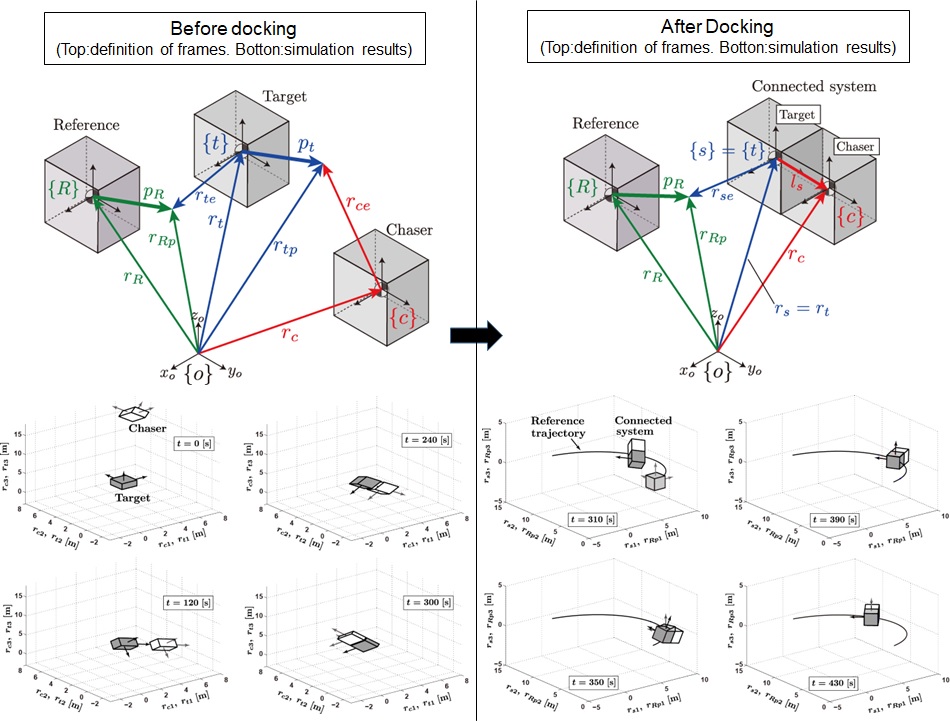
将来の宇宙機に課せられるミッションとして,スペースデプリの回収やランデブードッキングなど,大きな位置・姿勢変動をともなうミッションが考えられている.これらのミッションはターゲットとなる宇宙機へのトラッキング制御問題であり,このような宇宙機の運動は並進・回転の6 自由度運動が互いに干渉した非線形システムであるため,非線形運動を考慮した制御系設計が必要となる.
本研究では,宇宙機の6自由度非線形トラッキング制御問題に対する制御手法の構築を目的としている.
<関連文献>
1. Yuichi Ikeda, Yuichi Takaku: Stabilizing nonlinear robust control of spacecraft before and after docking, the 2025 Australian and New Zealand Control Conference, pp.126-131, 2025.
2. 池田裕一,高久雄一:宇宙機のドッキング前後の安定性を考慮した非線形制御,第10 回制御部門マルチシンポジウム,Paper No. 1M4-2(6 ページ),2023
3. Yuichi Ikeda, Takashi Kida and Tomoyuki Nagashio: Stabilizing Nonlinear Adaptive Control of Spacecraft Before and After Capture, Transactions of the Japan Society for Aeronautical and Space Sciences, Vol.59, No.1, pp.1-9, 2016
4. Yuichi Ikeda, Takashi Kida and Tomoyuki Nagashio: Nonlinear Tracking Control of Rigid Spacecraft under Disturbance using PID Type H∞ Adaptive State Feedback, Transactions of the Japan Society for Aeronautical and Space Sciences, Vol.58, No.5, pp.289-297, 2015
5. Yuichi Ikeda, Takashi Kida and Tomoyuki Nagashio: Nonlinear Tracking Control of Rigid Spacecraft under Disturbance using PD and PID Type H∞ State Feedback, The 50th IEEE Conference on Decision and Control and European Control Conference, pp.6184-6191, 2011
6. 池田裕一,木田隆,長塩知之:動的出力フィードバックによる宇宙機のトラッキング制御(受動性に基づいたアプローチ),日本機械学会論文集C 編,第75 巻,第759 号,pp.2933-2941,2009
本研究では,宇宙機の6自由度非線形トラッキング制御問題に対する制御手法の構築を目的としている.
<関連文献>
1. Yuichi Ikeda, Yuichi Takaku: Stabilizing nonlinear robust control of spacecraft before and after docking, the 2025 Australian and New Zealand Control Conference, pp.126-131, 2025.
2. 池田裕一,高久雄一:宇宙機のドッキング前後の安定性を考慮した非線形制御,第10 回制御部門マルチシンポジウム,Paper No. 1M4-2(6 ページ),2023
3. Yuichi Ikeda, Takashi Kida and Tomoyuki Nagashio: Stabilizing Nonlinear Adaptive Control of Spacecraft Before and After Capture, Transactions of the Japan Society for Aeronautical and Space Sciences, Vol.59, No.1, pp.1-9, 2016
4. Yuichi Ikeda, Takashi Kida and Tomoyuki Nagashio: Nonlinear Tracking Control of Rigid Spacecraft under Disturbance using PID Type H∞ Adaptive State Feedback, Transactions of the Japan Society for Aeronautical and Space Sciences, Vol.58, No.5, pp.289-297, 2015
5. Yuichi Ikeda, Takashi Kida and Tomoyuki Nagashio: Nonlinear Tracking Control of Rigid Spacecraft under Disturbance using PD and PID Type H∞ State Feedback, The 50th IEEE Conference on Decision and Control and European Control Conference, pp.6184-6191, 2011
6. 池田裕一,木田隆,長塩知之:動的出力フィードバックによる宇宙機のトラッキング制御(受動性に基づいたアプローチ),日本機械学会論文集C 編,第75 巻,第759 号,pp.2933-2941,2009
小中学生向けイベントコンテンツの作成
日本では1990年頃から「理科離れ」が問題視されており,技術者や研究者の確保が難しくなってしまうことが懸念される.「理科離れ」の大きな要因は、生活と理科との関連性やそれの必要性を知る機会が減っているためと考えられる.現状,教育機関や研究所,企業などが科学に関する体験教室などを行っているが,これらの多くは夏休みなどの長期休暇や大学のオープンキャンパスなど単発的な開催である.
本研究での目的は,小学生から中学生向けのコンスタントに開催でき,大学教員程度であれば大半が実施可能な内容のイベントの考案と実施を行うことである.現状はオルゴールごまを用いたイベントを考察し,定期的に実施している.詳細はSTEAM教育センダーのページを参照頂きたい.
<関連文献>
1.池田裕一,稲毛達郎,ものづくり体験イベントによる小学生への理科教育,第68 回自動制御連合講演会,pp.892-898,2025年11月
本研究での目的は,小学生から中学生向けのコンスタントに開催でき,大学教員程度であれば大半が実施可能な内容のイベントの考案と実施を行うことである.現状はオルゴールごまを用いたイベントを考察し,定期的に実施している.詳細はSTEAM教育センダーのページを参照頂きたい.
<関連文献>
1.池田裕一,稲毛達郎,ものづくり体験イベントによる小学生への理科教育,第68 回自動制御連合講演会,pp.892-898,2025年11月
小中学生向けプログラミング教材の開発
2020年度より,
(1)IT人材の育成
(2)論理的思考力または創造的な力の会得
(3)コンピュータスキルの習得
を目的とし,小中学校の授業でプログラミングが必修化され実施されている.しかし,現状の教育では
(I)教員のスキル不足
(II)学習環境の整備不足
(III)セキュリティ対策が必要
の3つが問題となっている.
本研究では「(I)教員のスキル不足」に注目している.プログラミング教育は新たに追加された教育内容であるため,どのように授業を展開していくのか,どのように教えればいいのか,という授業進行に関するノウハウがない.また,教員自身のプログラミングスキルもそれほど高くはないため,教員自身の学習が必要となるが,プログラミング教育は既存の教科と並行に実施されるため,研修を受けるとしても通常の業務と重なり教師に負担が大きくなると考えられる.この対応策として,共同研究先である大和市教育委員会教育研究所と相談した結果,以下の実施が効果的ではないかとの結論に至った.
(i)プログラミングを熟知していない教員は,生徒から事前に用意した解答以外のプログラムが提示されたときプログラムの正否や修正などの指導が行えないため,生徒のアイディアを生かした効果的な授業実施ができない.そこで,問題や解答を複数用意しておくことで,円滑で効果的な授業進行が可能となる.
(ii)プログラミングを熟知していない教員は,授業で用いる課題を作ることも難しく,多様な問題に対するプログラミング的思考,異なる問題における共通点の把握能力の育成を行うことが困難になる.これに対しては,教員以外で多様な課題を作成しておくことで,上記の問題は解決できる.また,教員側もこの課題を学習することで,自らのプログラミングスキルを向上させられる可能性がある.
本研究では,上記(ii)に対する資料作成を目的とする.
(1)IT人材の育成
(2)論理的思考力または創造的な力の会得
(3)コンピュータスキルの習得
を目的とし,小中学校の授業でプログラミングが必修化され実施されている.しかし,現状の教育では
(I)教員のスキル不足
(II)学習環境の整備不足
(III)セキュリティ対策が必要
の3つが問題となっている.
本研究では「(I)教員のスキル不足」に注目している.プログラミング教育は新たに追加された教育内容であるため,どのように授業を展開していくのか,どのように教えればいいのか,という授業進行に関するノウハウがない.また,教員自身のプログラミングスキルもそれほど高くはないため,教員自身の学習が必要となるが,プログラミング教育は既存の教科と並行に実施されるため,研修を受けるとしても通常の業務と重なり教師に負担が大きくなると考えられる.この対応策として,共同研究先である大和市教育委員会教育研究所と相談した結果,以下の実施が効果的ではないかとの結論に至った.
(i)プログラミングを熟知していない教員は,生徒から事前に用意した解答以外のプログラムが提示されたときプログラムの正否や修正などの指導が行えないため,生徒のアイディアを生かした効果的な授業実施ができない.そこで,問題や解答を複数用意しておくことで,円滑で効果的な授業進行が可能となる.
(ii)プログラミングを熟知していない教員は,授業で用いる課題を作ることも難しく,多様な問題に対するプログラミング的思考,異なる問題における共通点の把握能力の育成を行うことが困難になる.これに対しては,教員以外で多様な課題を作成しておくことで,上記の問題は解決できる.また,教員側もこの課題を学習することで,自らのプログラミングスキルを向上させられる可能性がある.
本研究では,上記(ii)に対する資料作成を目的とする.